红外遥控实验
红外遥控主要由红外发射和红外接收两部分组成。红外发射和接收的信号其实都是一连串的二进制脉冲码,高低电平按照一定的时间规律变换来传递相应的信息。为了使其在无线传输过程中免受其他信号的干扰,通常都将信号调制在特定的载波频率上(38K红外载波信号),通过红外发射二极管发射出去,而红外接收端则要将信号进行解调处理,还原成二进制脉冲码进行处理。
红外接收头有三个引脚,从左到右依次为VOUT、GND、VCC。红外遥控器发射的38K红外载波信号由遥控器里的编码芯片对其进行编码。当按下遥控器按键时,遥控器发出红外载波信号,红外接收器接收到信号,程序对载波信号进行解码,通过数据码的不同来判断按下的是哪个键。

接线

代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
| #include <IRremote.h> //引入函数库
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
pinMode(6,OUTPUT);
Serial.begin(9600);
Serial.println("Enabling IRin");
irrecv.enableIRIn();
Serial.println("Enabled IRin");
}
void loop()
{
if (irrecv.decode(&results))
{
Serial.println(results.value);
if(results.value==16738455)
{
digitalWrite(6,!digitalRead(6));
if(digitalRead(6)==HIGH)
Serial.println("LED HIGH");
if(digitalRead(6)==LOW)
Serial.println("LED LOW");
}
irrecv.resume();
}
delay(100);
}
|
红外遥控控制RGB显示不同颜色
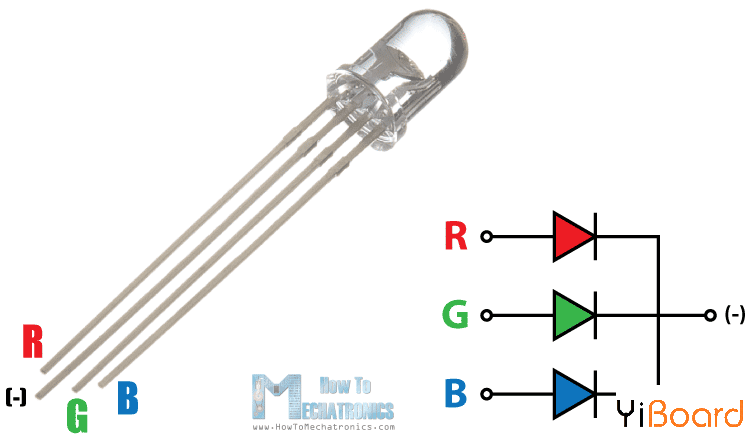
RGB LED灯可以通过混合红色、绿色和蓝色这三种基本颜色来发出不同的颜色。所以它实际上由3个独立的LED组成,红色、绿色和蓝色包装在一个盒子里。这就是为什么它有4个引脚,3种颜色中的每一种都有一种引线,而RGB LED类型则有一种共用阴极或阳极。在本次使用的是共阴极。
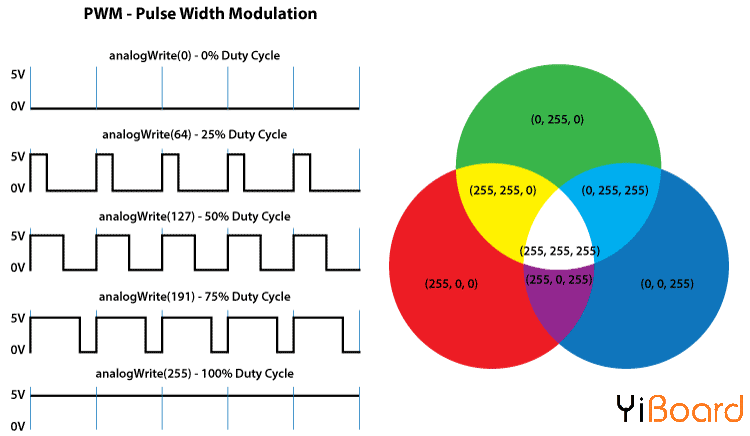
使用PWM模拟输出,以便获得所需颜色
代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
| #include <IRremote.h> //引入函数库
int RECV_PIN = 11;
IRrecv irrecv(RECV_PIN);
decode_results results;
void setup()
{
pinMode(5,OUTPUT);
pinMode(6,OUTPUT);
pinMode(7,OUTPUT);
Serial.begin(9600);
Serial.println("Enabling IRin");
irrecv.enableIRIn();
Serial.println("Enabled IRin");
}
void loop()
{
if (irrecv.decode(&results))
{
Serial.println(results.value);
if(results.value==16738455)
{
setColor(0, 0, 0);
delay(1000);
}
if(results.value==16724175)
{
setColor(255, 0, 0);
delay(1000);
}
if(results.value==16718055)
{
setColor(0, 255, 0);
delay(1000);
}
if(results.value==16753245)
{
setColor(0, 0, 255);
delay(1000);
}
if(results.value==16716015)
{
setColor(255, 255, 255);
delay(1000);
}
if(results.value==16726215)
{
setColor(170, 0, 255);
delay(1000);
}
Serial.println();
irrecv.resume();
}
delay(100);
}
void setColor(int redValue, int greenValue, int blueValue) {
analogWrite(5, redValue);
analogWrite(6, greenValue);
analogWrite(7, blueValue);
}
|
所以现在在loop函数中我们将制作程序,它将每秒改变LED的颜色。 为了在LED获得红光,我们将调用**setColor()**函数,并为redValue参数设置值255,另外两个参数设置0。 我们分别可以得到另外两种基本颜色,绿色和蓝色。 为了获得其他颜色,我们需要混合参数值。 因此,例如,如果将所有3个LED设置为最大亮度,我们将获得白光,如果我们将以下值设置为参数:170 redValue、0 greenValue和255 blueValue,我们将获得紫色光。
脉冲码
使用红外遥控测得遥控器得十进制脉冲码(本人)
| 符号 |
十进制脉冲码 |
符号 |
十进制脉冲码 |
| 0 |
16738455 |
关机 |
16753245 |
| 1 |
16724175 |
Mode |
16736925 |
| 2 |
16718055 |
静音 |
16769565 |
| 3 |
16743045 |
暂停 |
16720605 |
| 4 |
16716015 |
后退 |
16712445 |
| 5 |
16726215 |
前进 |
16761405 |
| 6 |
16734885 |
EQ |
16769055 |
| 7 |
16728765 |
VOL- |
16754775 |
| 8 |
16730805 |
VOL+ |
16748655 |
| 9 |
16732845 |
RPT |
16750695 |
| (长按) |
4294967295 |
U/SD |
16756815 |



