arduino学习笔记-L298N驱动四轮小车
L298N
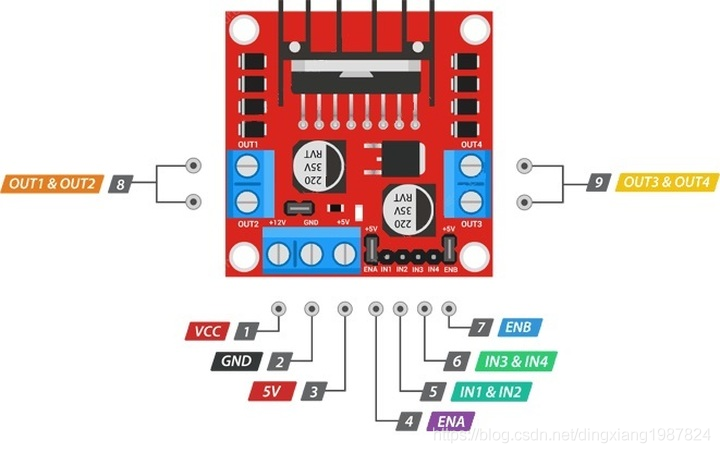
引脚图
L298N就是L298的立式封装,是一款可接受高电压、大电流双路全桥式电机驱动芯片。具有两个使能控制端,在不受输入信号影响的情况下通过板载跳帽插拔的方式,动态调整电路运作方式,有一个逻辑电源输入端,通过内置的稳压芯片78MO5,使内部逻辑电路部分在低电压下工作,也可以对外输出逻辑电压5V,为了避免稳压芯片损坏,当使用大于12V驱动电压时,务必使用外置的5V接口独立供电。
板载使能
当使用驱动电压为7V~12V:跳帽相连,内部电路由稳压器供电,不用外接5V电源,5V引脚由微控制器为外部电路供电
当使用驱动电压为12V~24V:跳帽不相连,应通过5V端子单独为内部供电,此时需两个供电电源
驱动板GND,开发板GND与电源负极相连,目的保持共地,让开发板的输出信号,有参考的水平面
电源引脚
VCC :外接直流电源引脚,电压范围在5~35V之间
GND: GND是接地引脚,连接到电源负极
5V: 驱动芯片内部逻辑供电引脚,如果安装了5V跳帽,则此引脚可输出5V电压,为微控板或其他电路提供电力供给,如果拔掉5V跳帽,则需要独立外接5V电源
输入引脚
IN1 & IN2:电机驱动器A的输入引脚,控制电机A转动及旋转角度
- IN1输入高电平HIGH,IN2输入低电平LOW,对应电机A正转
- IN1输入低电平LOW,IN2输入高电平HIGH,对应电机A反转
- IN1、IN2同时输入高电平HIGH或低电平LOW,对应电机A停止转动
- ENA跳帽拔掉时:通过PWM控制电机A的转速
IN3 & IN4:电机驱动器B的输入引脚,控制电机B转动及旋转角度
- IN3输入高电平HIGH,IN4输入低电平LOW,对应电机B正转
- IN3输入低电平LOW,IN4输入高电平HIGH,对应电机B反转
- IN3、IN4同时输入高电平HIGH或低电平LOW,对应电机B停止转动
- ENB跳帽拔掉时:通过PWM控制电机B的转速
输出引脚
OUT1 & OUT2:电机驱动器A的输出引脚,接直流电机A
OUT3 & OUT3: 电机驱动器B的输出引脚,接直流电机B
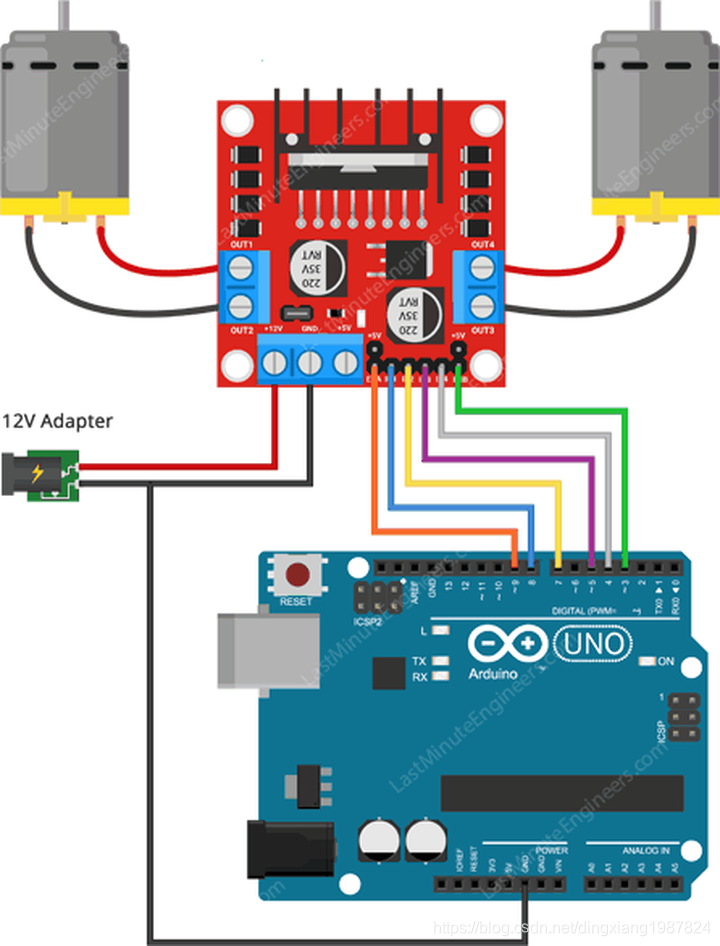
L298N电机驱动板 + 直流电机控制接线图
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Binhao's Blog!



